
專題準備資料-即時影像傳輸探測車
by 艾鍗學院, 2012-09-05 12:29, 人氣(5915)
- 即時影像傳輸探測車
摘要
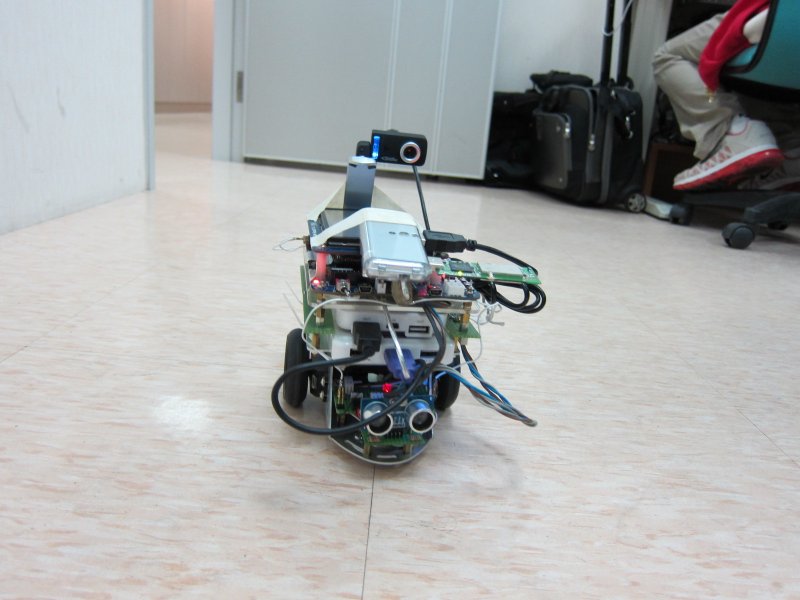
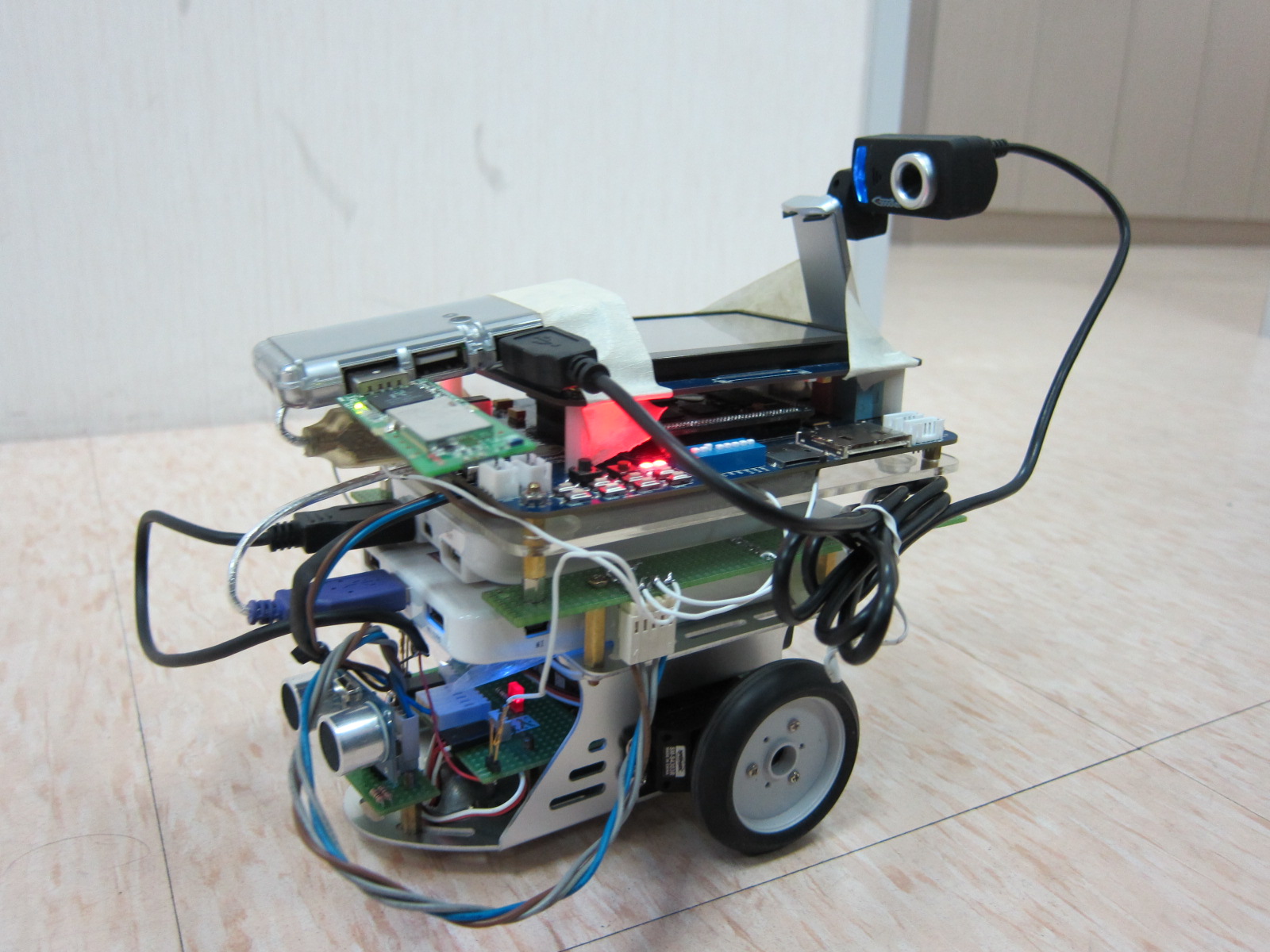
美國NASA於2012年8月5日宣布“好奇號“成功登陸火星,並傳回火星表面圖像,再度重啓自走車風潮。故本組也以嵌入式Linux系統為基礎,結合了影像擷取、WiFI、超音波感測器實做出自走車系統。車體運動方式採差動變速以得到較好及多變的方向及速度控制,故利用2個360度的伺服馬達,透過PWM (脈波調變)產生的差動驅動方式來控制車輪。影像擷取部份接上WebCam 擷取影像輸出至LCD面板並且透過 WiF 802.11n將影像串流。車體上同時配有超音波距離感測器,若偵測到障礙物可以繞道改變方向。最後,車體的控制方式可以藉由智慧型手耭Android APP來控制車體的前進、後退、左轉、右轉、停止的功能並且還可同時觀看車體上所擷取的即時畫面。
關鍵詞:自走車、WiFi、802.11n、PWM、伺服馬達、Android、串流
照片區


Preview DEMO Video
自走車功能測試--障礙物體偵側
偵側障礙物體,車子會自動繞道
===================================================
1.)了解”座標”? “路徑”的概念? 如何做到室內定位? 請針對以上問題提出解決方案.
2.)Study 超音波模組
http://sites.xms.com.tw/board.php?courseID=143&f=doc&cid=9104
3.)Study 電子羅盤
之前有做過...請先把板子做好!!
http://sites.xms.com.tw/board.php?courseID=143&f=forumlist
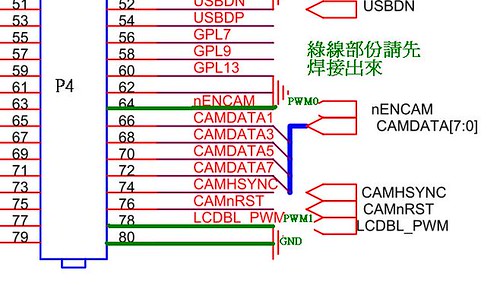
1.) 請你們先將你手邊的板子,先把PWM pin腳拉出來,
再拉個5V電源 , 並做個小板子, 做2個 3 pin (公)
(5V,GND,signal).,接你們的伺服馬達.
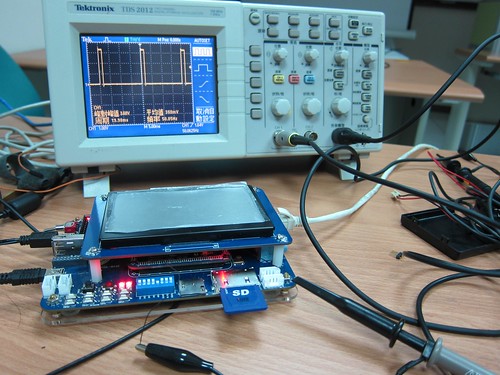
2.) Driver 程式,我已經完成, 本週六我們可以用你們的板子測試一下
對於 Servo 相關資料 你可以參考如何控制伺服馬達
3) Image Streaming 部份,可以用M-JPEG Streamer Open Source
4) WIFI, WebCAM的部份請確定好硬體界面且相關Driver移植也要先著手進行了
3, 4 部份, 請務必先study
討論
| 編號 | 標題 | 回應 | 讚 | 最後發表 |
| 14905 | 1 | 0 | ||